Enkel styrning av R/C-servo
Idag kan man styra allt på sin modelljärnväg digitalt via dator eller smarta ställverk. Men många väljer kanske en medelväg där vissa funktioner styrs manuellt. Ofta vill man också styra saker mjukt och långsamt som bommar, stallportar och växlar. Här visar jag hur man med en liten mikroprocessor kan styra ett R/C-servo som man normalt finner i radiostyrda modeller.
Observera att mikroprocessorn måste laddas med ett program. Det räcker inte att bara köpa processorn och koppla ihop. Då fungerar ingenting. Jag kan bistå med processorer laddade med mitt program.
Servot går mellan två lägen där båda dessa lägen enkelt kan ställas in. Även tiden det tar från ena läget till det andra är inställbart. Att ställa in detta går till på ungefär samma sätt som på en digital väckarklocka. Se beskrivning längre ner. Dessa inställningar samt senaste läget lagras i mikroprocessorns minne och plockas fram automatiskt vid start.
Att styra byte av läge kan ske på tre olika sätt:
| Fast on/off med exempelvis en vippomkopplare |
| Två tryckknappar eller återfjädrande vippa med mittläge |
| En tryckknapp där läget växlar vid varje tryck |
En utgång kan styra ett relä för att mata en växels spårkors där reläomslaget sker när servot är halvvägs till nästa läge.
En fullfjädrad variant kan då se ut så här. Här finns reläet med för att polarisera ett spårkors. Reläet ska ha spolspänning 5 volt och gärna 300 ohm eller mer i spolresistans. Givetvis kan man mata just reläspolen med 12 eller 24 volt i stället om man föredrar det. De två omkopplarna till vänster illustrerar lite hur man gör vid inställning/programmering. Normalt räcker det sen som enklast med en slutande kontakt för att välja läge på servot.
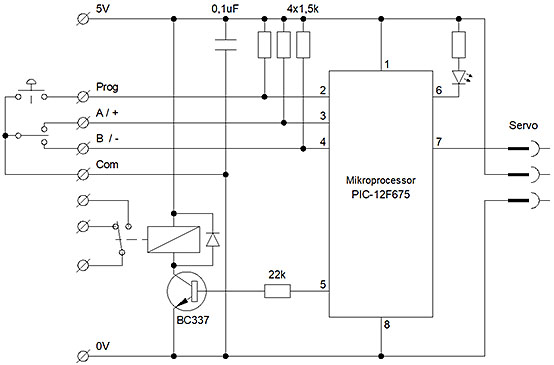
Inställningarna sker i fem steg med hjälp av en tryckknapp (eller trådstump) ansluten mellan "Com" och "Prog". Vid varje tryck (första trycket kräver 2 sek) visar lysdioden med det antal blink som motsvarar det steg man står på. Efter första trycket står man på steg ett och lysdioden ger ett blink, väntar en sekund och blinkar en gång igen och så vidare. Efter steg fem avslutas inställningarna med ett sjätte tryck varvid återgång till normal funktion sker.
| Steg | |
| 1 | Servot intar mittläge, alltså halvvägs mellan Läge A och B. Kan vara bra när man justerar länkage. |
| 2 | Servot går till A-läget och man kan ändra det läget (vinkeln) med ingångarna +(A) och -(B). Varje tryck på + eller - ändrar vinkeln lite. Håll knappen intryckt för att ändra mycket. |
| 3 | Servot går till B-läget och man kan ändra det läget med ingångarna +(A) och -(B). Varje tryck på + eller - ändrar vinkeln lite. Håll knappen intryckt för att ändra mycket. |
| 4 | Servot går växelvis mellan de programmerade lägena och hastigheten kan ändras med ingångarna +(A) och -(B). Varje tryck på + eller - ändrar hastigheten. Kan ställas i 15 olika hastigheter. Alltså 15 tryck från långsammast till snabbast och vise versa. | 5 | Om det visar sig att reläet efter övriga inställningar ger fel polaritet till spårkorset så kan man i detta steg skifta läge med ett tryck på +(A). |
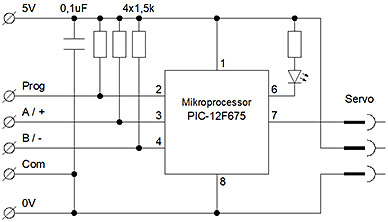
Om man inte behöver mata en växels spårkors eller bara ska styra bommar eller stallportar blir det väldigt okomplicerat.
Man kan styra byte av läge på tre sätt enligt följande exempel.
|
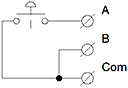
En enkel enpolig omkopplare och en bygel mellan "Com" och "A". Byter till B-läge vid sluten kontakt och återgår till A-läge när kontakten öppnas. |
|
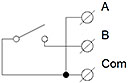
En återfjädrande vippomkopplare med mittläge eller två separata tryckknappar. Ger direktval av läge A eller B. |
|
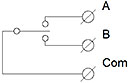
En återfjädrande vippomkopplare eller tryckknapp samt en bygel mellan "Com" och "B". Växlar läge vid varje tryck. |
Motstånden som håller upp ingångarna till 5 volt har jag valt med relativt låga värden för att det inte ska bli störningskänsligt. Man bör ändå inte ha mer än någon meter eller två mellan krets och manöverknappar. Är det så att man har flera ställverk med möjlighet att styra samma växel och därför långa avstånd/kabellängder. Ja då kanske man får lägga till optoisolering på A- och B-ingångarna vilket fixas enkelt med två motstånd och en 8-pinnars optokopplare med två kanaler.
|
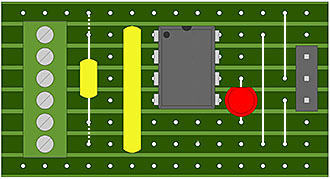
Den enkla versionen är väldigt enkel att bygga på en labplatta. Till motstånden använder man ett resistansnät av SIL-typ (single in line) med 5 motstånd och 6 anslutningar. Skruvplinten till vänster kan såklart bytas mot en stiftlist eller något annat lämpligt. Förutom plint och servokontakt är det bara fyra komponenter och tre byglar. Kan knappast bli enklare. |
|
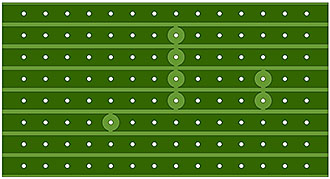
Denna bild visar var banorna måste kapas. Sett från samma sida som ovanstående bild. Man använder lämpligen ett borr på 3 mm som man snurrar mellan fingrarna för att borra av banan. |